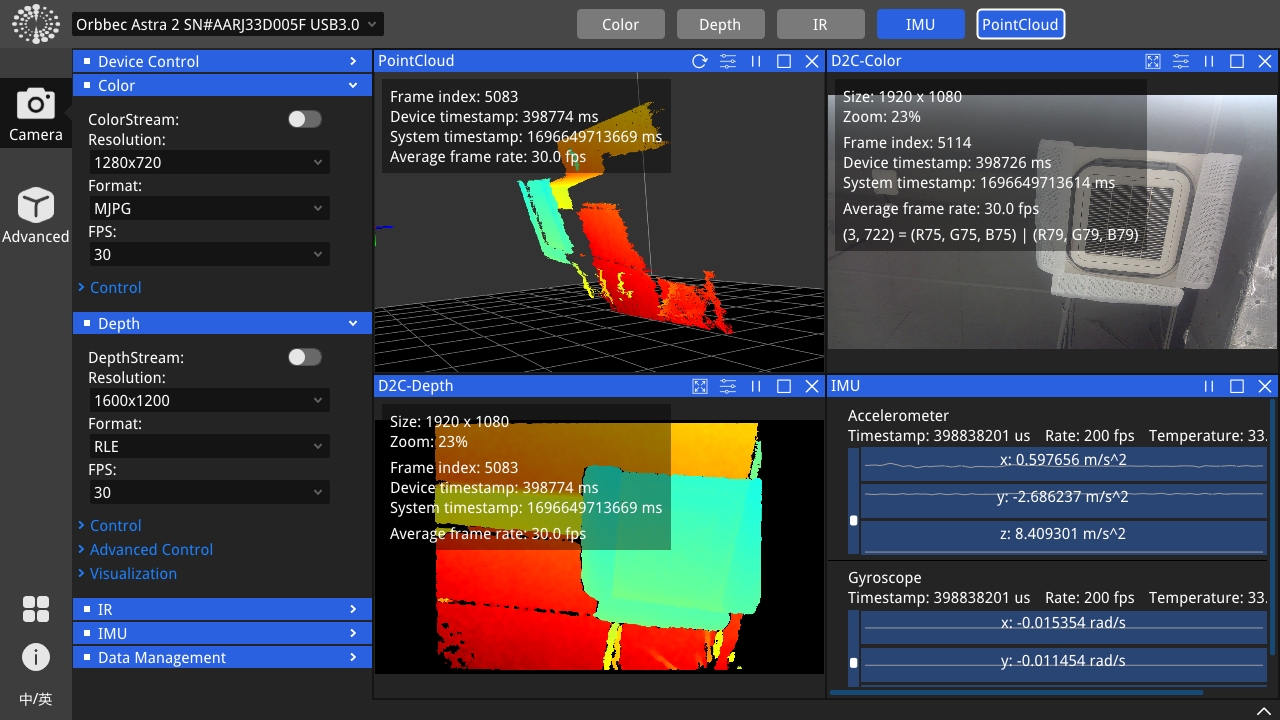
Orbbec Binocular Camera Gemini2——奥比中光双目摄像Gemini2
2025-07-30
Integration analysis of Orbbec binocular camera Gemini2 and existing RKNN-based multi-threaded reasoning framework奥比中光双目摄像Gemini2与现有基于RKNN的多线程推理框架集成分析
352 words
|
2 minutes
Use iPhone and iPad equipped with LiDAR to perform 3D scanning and record——使用配备LiDAR的iPhone或iPad进行3D扫描留存记录
2025-07-30
Preliminary use of 3dSacnner, Scaniverse and other software to scan some scenes with preservation value as 3D assets 初步使用3dSacnner,Scaniverse等软件进行扫描一些有保存价值的场景,作为3D资产
7 words
|
1 minute
An intelligent crop disease detection system powered by YOLO and DeepSeek——一个由 YOLO 和 DeepSeek 驱动的智能农作物病害检测系统
2025-07-28
An intelligent crop disease detection system powered by YOLO and DeepSeek.一个由 YOLO 和 DeepSeek 驱动的智能农作物病害检测系统。采用 Vue.js、Spring Boot 和 Flask 构建的全栈微服务架构,支持对图片、视频和实时摄像头画面的病害进行实时分析。
1645 words
|
8 minutes

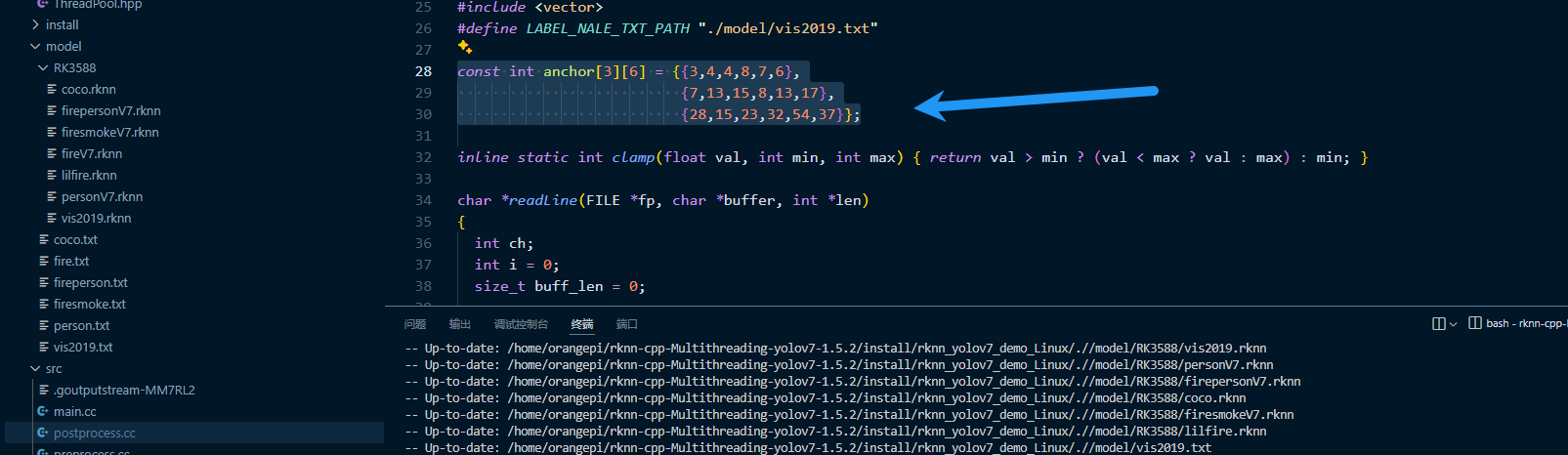
YOLO V7 and multi-threaded optimization and edge device RK3588-RK3588S deployment——YOLO V7及多线程优化和边缘端设备RK3588-RK3588S部署
2025-07-27
YOLO-V7在RK3588/RK3588S边缘端设备的部署方案。采用多线程技术,支持8个并行线程,同时处理8帧,实现摄像头/视频文件/RTMP/RTSP流的实时处理,并结合GPIO和串口。
608 words
|
3 minutes
YOLO V11 and multi-threaded optimization and edge device RK3588-RK3588S deployment——YOLO V11及多线程优化和边缘端设备RK3588-RK3588S部署
2025-07-26
在RK3588/RK3588S边缘端设备上部署YOLO-V11模型并进行多线程优化。和实时占用情况。
328 words
|
2 minutes